中国科学技术大学工程科学学院、人形机器人研究院贠国霖特任教授与英国剑桥大学Tawfique Hasan教授合作,在柔性电子与智能传感领域取得重要研究进展。研究团队通过对石墨烯-液态金属复合材料的多尺度结构设计,成功制备出一种兼具高灵敏度、宽线性范围与精准三维力解耦能力的微型化传感器阵列,为人形机器人、精密操作机器人等设备实现类人指尖触觉感知提供了创新解决方案。相关研究成果以“Multiscale-structured miniaturised 3D force sensors”为题,于近日发表于《Nature Materials》。
人类指尖皮肤能够实时感知压力、剪切力、振动及纹理等多维触觉信息,这依赖于密集的机械感受器与复杂的信息处理机制。赋予机器人或智能假肢媲美人类的三维触觉能力,是实现其与物理世界进行安全、灵巧交互的核心前沿。然而,现有柔性触觉传感器难以在微型化尺寸下,同时实现高灵敏度、宽线性检测范围以及对三维空间力矢量(法向力与二维剪切力)的精准测量与解耦,严重制约了下一代机器人灵巧操作能力的发展。为突破这一困境,研究团队对石墨烯-液态金属复合材料进行多尺度力学结构设计,成功开发出单元尺寸仅200微米、检测极限低至μN级的微型三维力传感器阵列,为下一代人机交互与精密操作提供了高效解决方案。
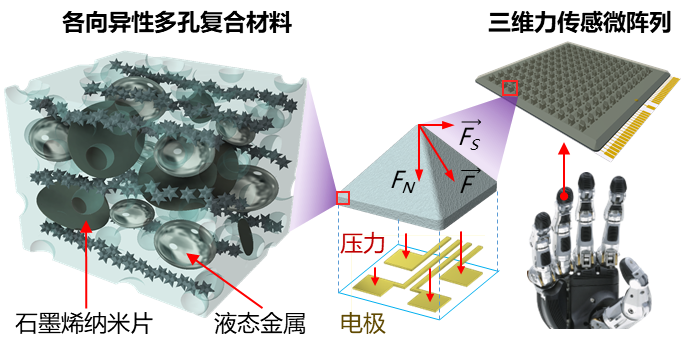
图一、基于多尺度结构复合材料的三维力传感阵列
研究团队首先聚焦于材料创新,制备出一种各向异性多孔弹性体(APE)。该材料以多孔聚合物为基体,复合了表面带尖刺的镍颗粒、少层石墨烯纳米片与液态金属微滴,并通过磁场诱导使镍颗粒定向排列,形成三维导电网络(图一)。该网络结构使材料沿颗粒链方向(0°)的导电率较垂直方向(90°)高出24倍,且对沿链方向的压力极为敏感,灵敏度较无孔各向异性材料提升13.6倍,同时能有效抑制横向变形的干扰,为后续传感器设计奠定了优异的材料基础。
受人体表皮微观结构启发,团队进一步设计制备了金字塔形传感器单元。该结构巧妙地将材料本身的非线性电-力响应与几何结构引入的硬化效应相耦合,从而在0至500 kPa的宽压力范围内获得了高度线性的电导-压力响应(R²>0.998),灵敏度最高达122.7 kPa⁻¹(图二)。
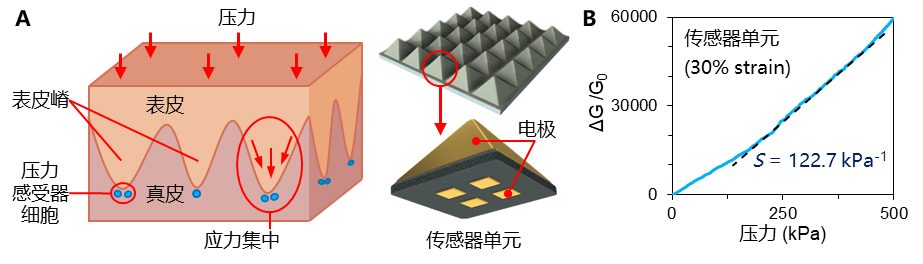
图二、仿真皮层的传感器结构设计和传感器的电导-压力响应曲线
更为关键的是,该金字塔结构能够将不同方向的接触力转化为其底部特征各异的压力分布。通过在单元底部集成四个对称电极测量压力分布,即可依据建立的数学模型,实时、精准地解算出施加在传感器上的三维力矢量的大小与空间方向(图三)。实验表明,该传感器对力方向的测量误差小于2°,对力大小的测量误差小于3.1%。此外,传感器还能通过检测剪切力的突变来识别物体滑动,并通过分析滑动过程中的信号波动来估测接触表面的粗糙度。
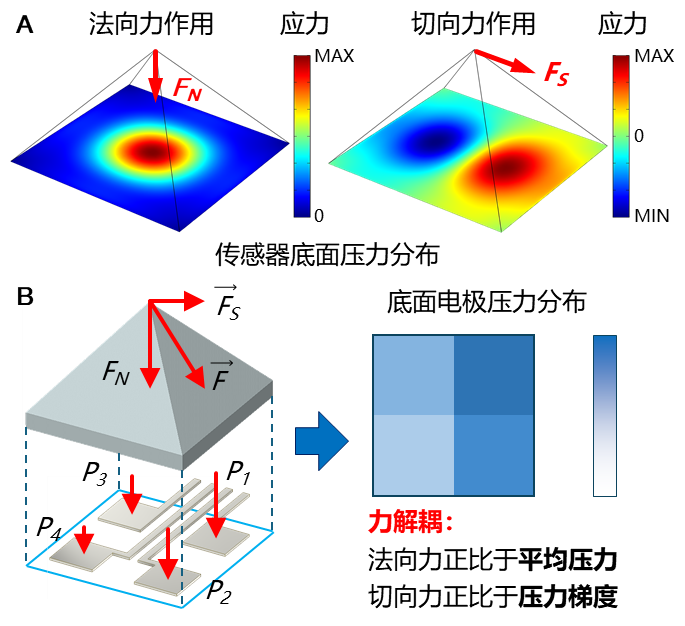
图三、传感器解耦三轴力的原理
团队还将传感单元尺寸进一步缩小至200微米,制备出高密度微传感器阵列。该微阵列空间分辨率达300微米,可检测低至0.9微牛(约一粒沙子重量)的微小力,并成功通过三维力分布实现了金属球体的材质与尺寸识别,展示了其在微操作机器人等精密领域的应用潜力。
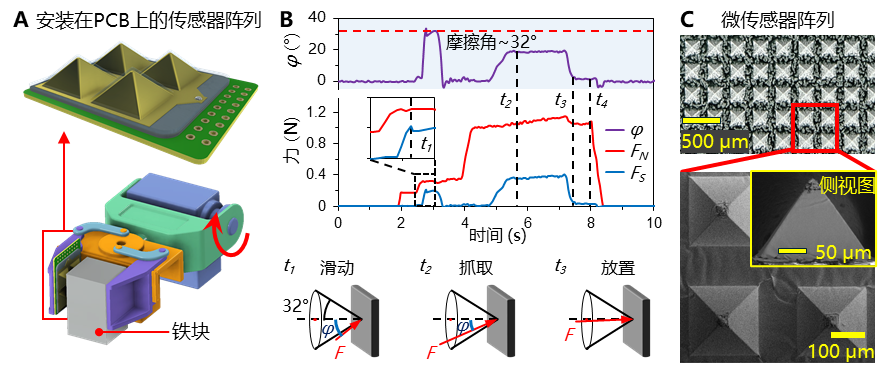
图四、(A)安装三维力传感阵列的机械臂;(B)机械臂实现铁块的智能转移;(C)微型传感器阵列
该研究通过从多尺度复合材料开发到仿生三维力解耦结构设计的系统性创新,成功研制出高性能微型化三维力传感阵列。其综合性能在灵敏度、线性度、空间分辨率与检测极限等方面均处于国际领先水平。这项工作为发展具备高精度触觉感知能力的下一代机器人、智能假肢及电子皮肤提供了新的技术途径,对推动机器人灵巧操作技术的发展具有重要意义。
论文第一作者为中国科学技术大学工程科学学院、人形机器人研究院贠国霖特任教授,通讯作者为贠国霖和剑桥大学Tawfique Hasan教授。该工作得到了中国科学技术大学人形机器人研究院重点课题、安徽省科技创新攻坚计划项目和英国皇家学会牛顿国际学者项目资助。
论文链接:https://www.nature.com/articles/s41563-026-02508-7
(工程科学学院、人形机器人研究院)