近日,中国科学技术大学工程科学学院/人形机器人研究院董二宝副教授课题组、张世武教授课题组在机器人力跟踪柔顺控制领域取得了重要进展,相关研究成果以“Impedance Learning-based Adaptive Force Tracking for Robot on Unknown Terrains”为题,发表于国际知名期刊《IEEE Transactions on Robotics》。
在开放环境中,机器人常常需要操作具有不确定表面刚度和形貌特性的物体,这对传统力跟踪控制方法构成了巨大挑战。近年来,基于仿真的强化学习为解决这一问题提供了新的思路,但其学习结果的稳定性和收敛性仍缺乏明确的理论支持。因此,如何在保证系统稳定性的前提下,利用强化学习提高机器人对不确定性物体的自适应柔顺操作能力,成为当前机器人研究中的关键难题。
为此,研究团队创新性地结合深度强化学习前馈与可变阻抗反馈机制,提出了一种具备可解释性的自适应阻抗学习控制策略。相比于传统方法依赖大量学习样本的详尽示例策略,本研究通过Lyapunov稳定性理论和压缩映射原理(即Banach不动点定理),为所提出的控制策略提供了严格的稳定性和收敛性理论证明,从而保证了该控制策略在实际应用中的可靠性。
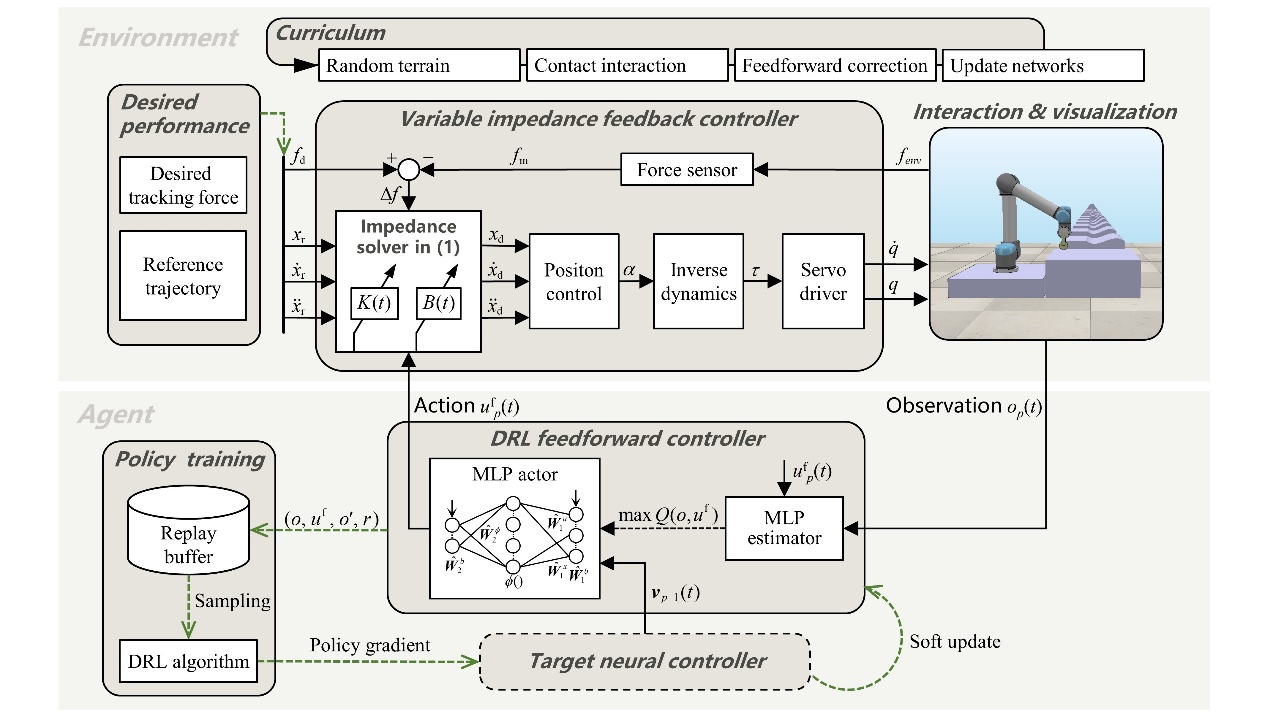
图1 基于强化学习前馈的变阻抗控制策略示意图
研究团队实验对比了所提策略与经典的定常阻抗控制和自适应阻抗控制的性能。结果表明,该控制策略在对象适应性和泛化能力上具有显著优势,尤其在机器人进行表面打磨、果蔬削皮以及复杂人机交互等任务中,力跟踪误差平均下降了45.6%至89.1%。这些实验结果表明,所提出的控制策略不仅在理论上得到了严格验证,也在实践中展现出了优异的性能和广泛的应用潜力。该研究显著提升了机器人在复杂不确定环境中的自适应力跟踪能力,为机器学习方法在机器人精密柔顺操作任务中的实际应用奠定了理论基础。
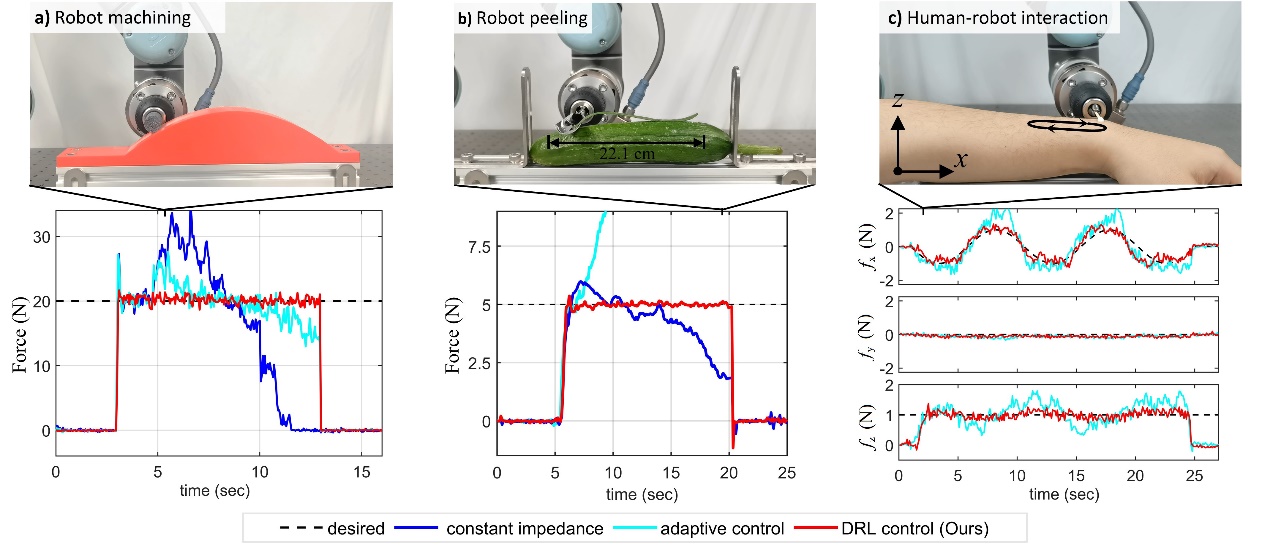
图2不同控制策略在复杂表面操作和人机交互任务中的性能对比
我院精密机械与精密仪器系博士生李阳鸿为论文第一作者,董二宝副教授为论文通讯作者,张世武教授、博士生郑立和王亚豪为论文共同作者。该工作得到国家重点研发计划、安徽省科技创新攻坚计划、中央高校基本科研业务费等项目支持。
《IEEE Transactions on Robotics》是机器人领域的顶级期刊,平均每年的发文量约200篇左右,发表关于机器人技术各个方面的基础论文,特别关注用于非结构化环境的智能机器和系统。许多具有里程碑意义的机器人领域研究成果都曾在该期刊上发表。
论文链接:https://doi.org/10.1109/TRO.2025.3530345
(精密机械与精密仪器系,人形机器人研究院)