中国科学技术大学工程科学学院、人形机器人研究院张世武、董帅、王二龙研究团队在柔性触觉传感与多模态感知领域取得重要研究进展。团队提出了一种基于连续液态金属界面的触觉传感新范式(Continuous Liquid Metal Enabled Flexible Tactile Sensing,CLIMETS),成功实现了对多模态触觉信息的无阵列及连续感知。相关研究成果以“Continuum Tactile Sensing via an Amplified Liquid Metal Interface”为题,于近日发表于国际权威学术期刊《Science Advances》。
多模态触觉感知是人形机器人实现灵巧操作、人机交互和环境自适应的关键能力。然而,传统的柔性电子皮肤主要依赖于离散的传感器阵列,面临布线复杂、柔韧性受限以及软硬界面机械可靠性低等固有瓶颈。为突破这一困境,研究团队创新性提出“连续体触觉感知”新思路,通过单一、无结构的液态金属界面即可实现按压、位置与滑动等多种触觉信息的连续感知,大幅简化了系统结构。
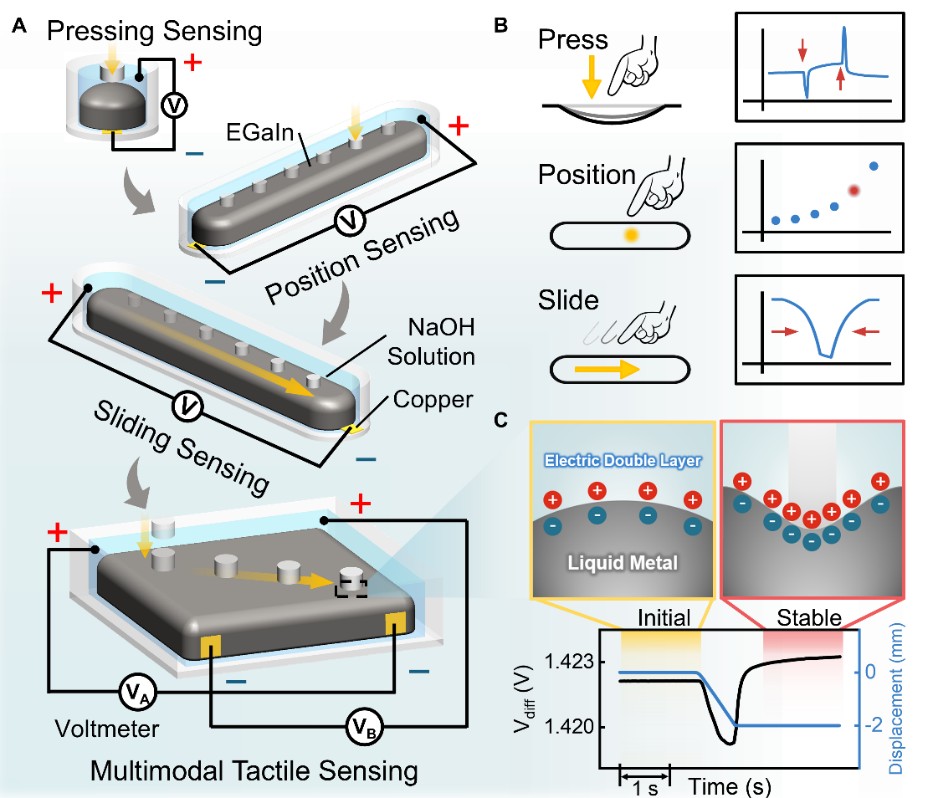
图1.CLiMETS连续体触觉感知平台及不同机械输入下的特征电压响应
研究发现,液态金属界面的双电层(EDL)电压会随机械变形发生动态变化;更重要的是,当导电石墨接触液态金属时,由于界面电荷转移效应,触觉信号可实现超过100倍的协同放大,将原本微弱的界面响应转化为高灵敏、可稳定读取的电信号。这一“接触放大”机制为高性能柔性触觉传感提供了全新的底层机理。
基于这一独特的信号放大机制,团队进一步构建了几何编码双通道感知策略,在5×5厘米液态金属平面上实现了高精度二维位置识别和8个方向的滑动轨迹辨识。与传统阵列式电子皮肤不同,该系统无需像素化传感单元,仅依赖连续界面即可完成空间触觉定位与运动方向解析,展现出“无阵列化”触觉感知的独特优势。研究团队还搭建了人形机器人触觉演示系统,通过实时解析触觉信号,实现复杂动作序列重建,并进一步驱动LED阵列完成视觉反馈验证,展示了该技术在人机交互系统中的应用潜力。
该研究建立了基于连续液态金属界面的全新触觉感知范式,为下一代人形机器人电子皮肤提供了新的技术路线。未来,该技术有望应用于人形机器人触觉系统、可穿戴设备等领域,使机器人具备更加接近人类皮肤的连续触觉感知与环境交互能力。
我校王二龙副研究员、硕士生孙铭远和博士生葛杜安为论文共同第一作者,张世武教授、董帅副研究员和新南威尔士大学唐诗杨教授为论文共同通讯作者。该研究工作得到了安徽省科技攻坚计划重大项目、人形机器人研究院重点项目、国家自然科学基金项目等基金的资助与支持。
论文链接:https://www.science.org/doi/10.1126/sciadv.aec3673
(工程科学学院、人形机器人研究院)