近日,中国科学技术大学工程科学学院仿生机器人研究团队在机器人触觉感知研究领域取得新进展,提出了一种采用表面结构色和深度学习方法的新型柔性触觉感知方法。相关成果以“An Optical Tactile Sensor with Structural Color Using Deep Learning Method”为题在2019 IEEE International Conference on Mechatronics and Automation (IEEE ICMA 2019)发表和口头报告,获得大会最佳论文提名奖;并在多个提名奖论文中脱颖而出,荣获以IEEE总主席Toshio Fukuda教授冠名的机电一体化最佳论文奖(Toshio Fukuda Best Paper Award in Mechatronics)。
IEEE ICMA由国际电气电子工程师学会(IEEE)主办,自2003年创办以来每年一届,是国际机器人及自动化领域具有重要影响力的会议。IEEE ICMA 2019于8月4日至7日在中国天津召开,来自中国、美国、加拿大、澳大利亚、英国、德国、日本、韩国、台湾、香港等约28个国家和地区的450余名专家、学者参加了本届会议;本届大会接收投稿论文682篇,录用449篇。
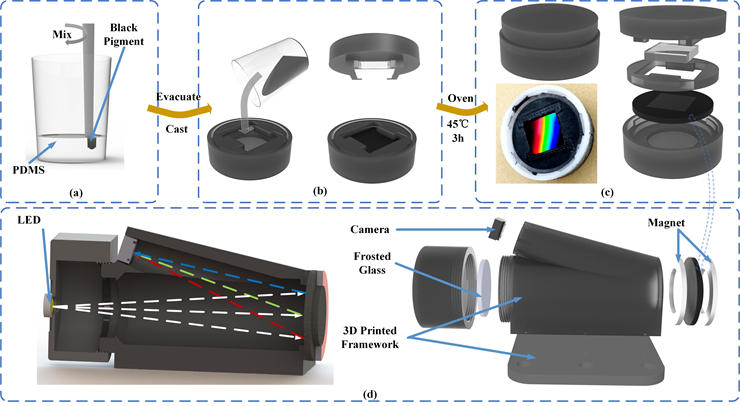
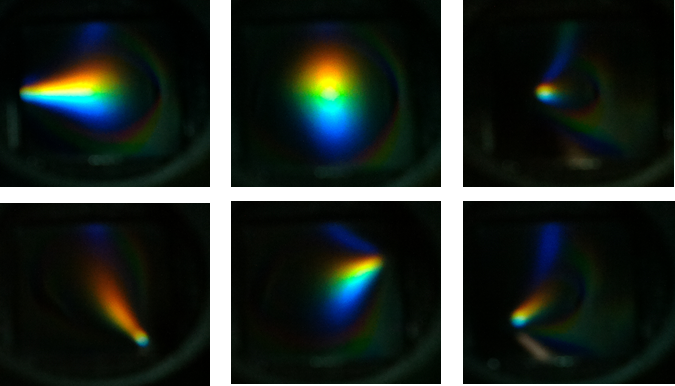
工院仿生机器人研究团队于2017年发表在机器人领域顶会IEEE ICRA上的论文“Chromatic surface microstructures on bionic soft robots for non-contact deformation measurement”首次提出在软体机器人表面制备仿生微纳结构形成表面结构色,以用于软体机器人的非接触变形测量,引起国内外同行的关注。随后提出基于表面结构色的机器人柔性触觉感知方法,于2019年发表在仿生学著名期刊《Bioinspiration and Biomimetics》上。发表在IEEE ICMA 2019的论文中,该团队进一步探究了该类型柔性触觉传感器的小型化设计和基于深度学习算法的触觉感知信息处理方法。
本论文的第一作者系工程科学学院精密机械与精密仪器系硕士生郝家文,合作者为博士生朱胤,通讯作者为董二宝副教授。该工作得到国家自然科学基金、国家重点研发计划和中央高校基本科研业务费专项资金资助。
(中国科学院材料力学行为和设计重点实验室、精密机械与精密仪器系)