中国科学技术大学工程科学学院、人形机器人研究院王洪波研究员课题组研制了一种名为“OriCube”的指尖大小六维力/力矩(F/T)传感器。该传感器体积仅14×14×12mm³、重量4g,在23N量程下实现3mN级分辨率,并可嵌入机器人灵巧手指尖,在曲面接触中实时输出接触点位置与力矢量,为机器人“像人一样用手指触摸与操作”提供关键感知能力。成果以“A Fingertip-Size Six-Axis Force Sensor via Origami Coil Arrays for Intrinsic Tactile Sensing”为题发表在国际期刊《IEEE/ASME 机电一体化汇刊》(IEEE/ASME Transactions on Mechatronics)上。
触觉是实现灵巧操作与安全人机交互的关键能力。现有指尖触觉方案多依赖阵列式分布传感单元或柔性电子皮肤,虽然信息丰富,但往往面临布线复杂、数据处理负担重、曲面适配与耐冲击性不足等瓶颈。研究团队提出以嵌入式六轴F/T传感器为核心、结合几何模型实现内生触觉感知(Intrinsic Tactile Sensing, ITS),以更简洁的系统实现实时接触信息感知(图1)。
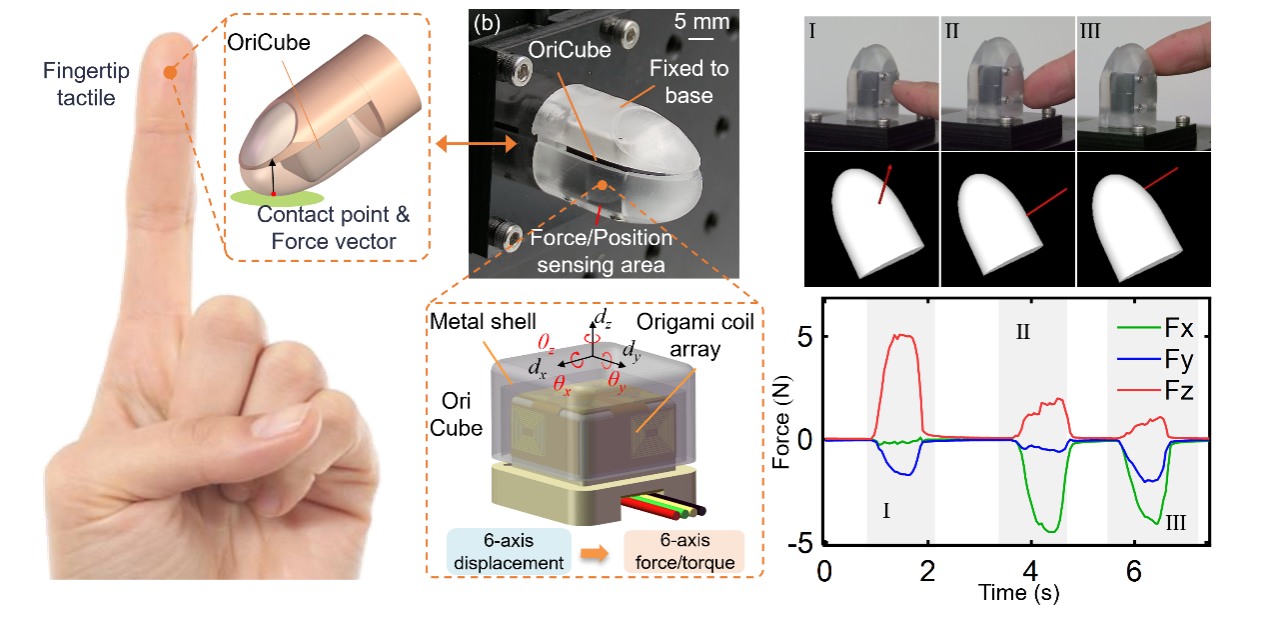
图1 基于指尖六维力传感器的内生触觉感知
OriCube采用折纸式三维线圈阵列(基于柔性电路板FPC一体制造并折叠成三维结构),利用电涡流耦合效应,同时测量金属外壳在六个自由度(平移与转动)上的微小位移和转角。该结构设计(图2)显著降低了轴间串扰,同时实现了线圈与信号调理电路的小型化封装集成,便于嵌入机器人指尖。在机械设计上,OriCube 使用模块化硅胶“微弹簧”弹性体(12个硅胶弹簧)将外部力/力矩加载转换为壳体的位移与转角,并允许对不同轴向刚度进行调节,可按需设计,实现灵敏度与量程的平衡。
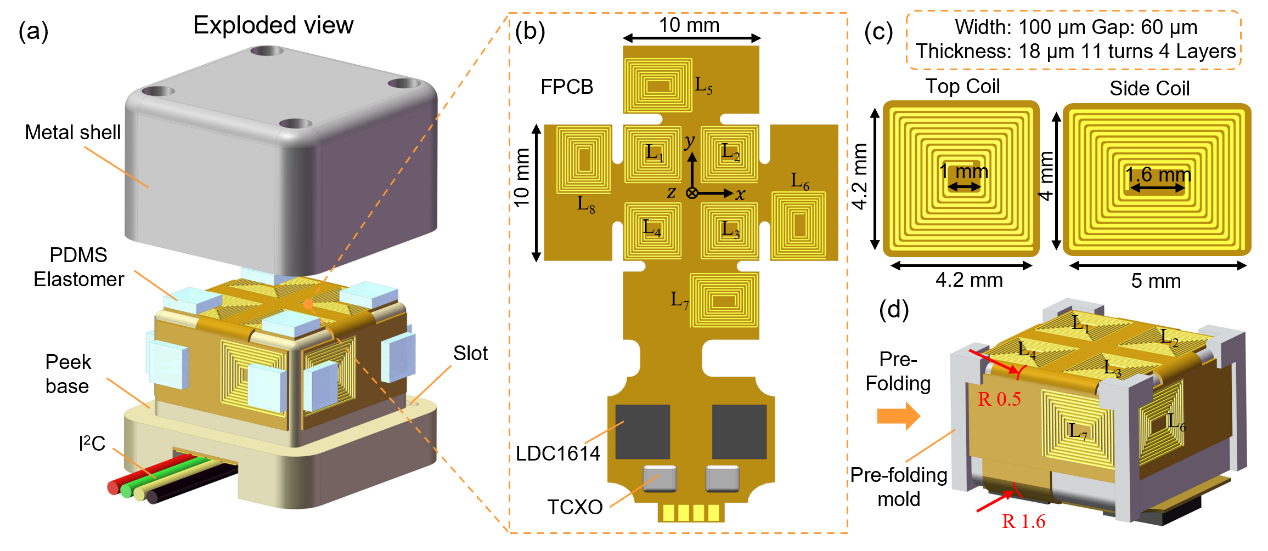
图2 六维力传感器结构设计
严格标定和测试结果表明,OriCube在“指尖尺寸、低功耗、强鲁棒”约束下实现了高性能六轴力/力矩测量:具有体积小(14×14×12mm³)、重量轻(4g)、功耗低(45mW)等特点;同时具备较低的轴间串扰与较高测量精度(最大误差<2%、最大串扰约2.24%),并在6小时连续运行中保持较小漂移(<0.2% F.S.)。此外,该传感器既能感知羽毛轻触等弱接触,也能承受锤击带来的冲击脉冲,并对外界磁场扰动表现出良好抑制能力,可在复杂工况下为机器人提供可靠稳定的感知信息。
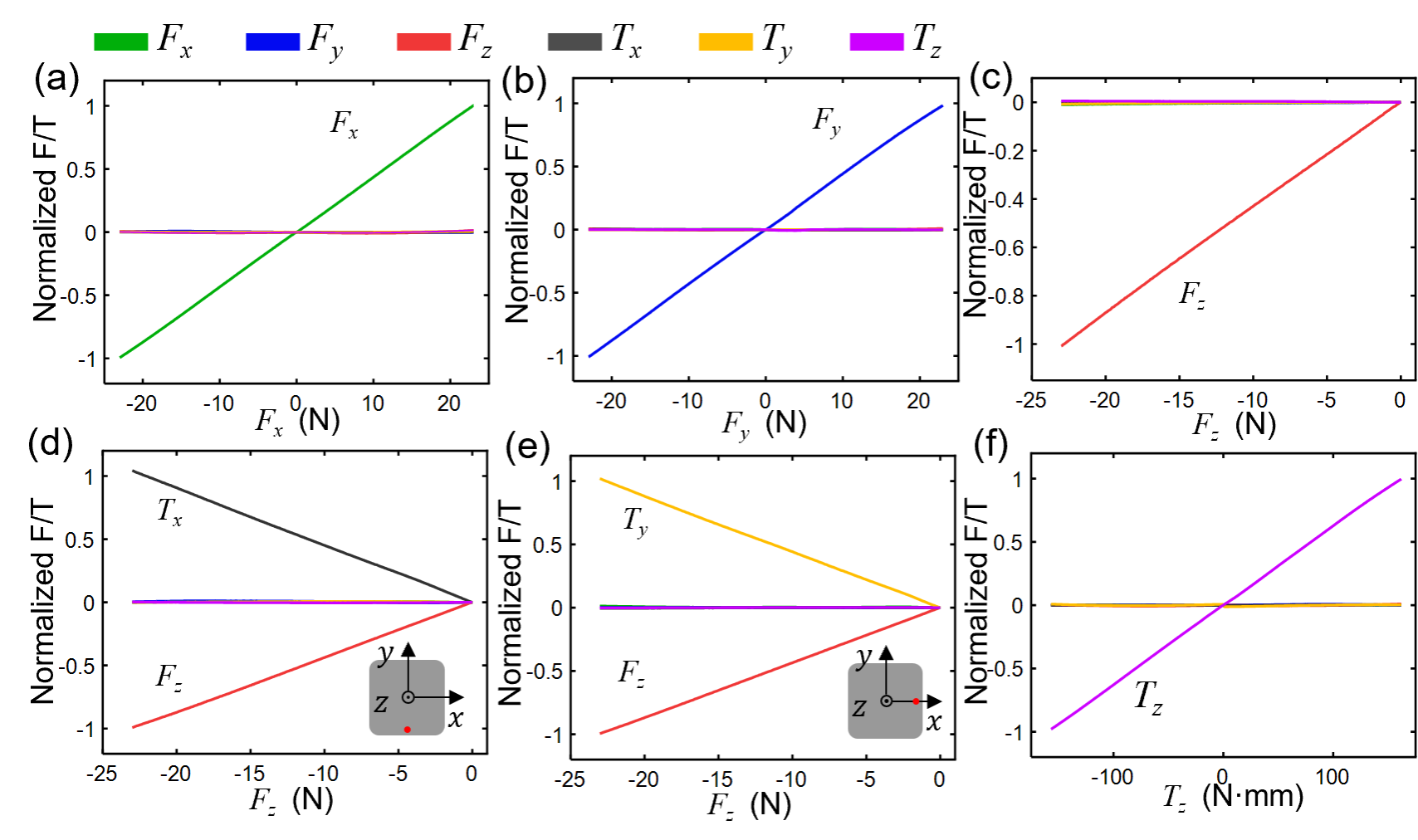
图3 传感器各轴输出结果
团队将OriCube嵌入三维打印仿生指尖结构,结合ITS方法在指尖曲面上实现了实时触觉感知,可同时估计接触位置与接触力矢量。实验结果表明,该触觉感知方法得到的结果与外部参考力传感器高度一致。该工作提供了一种低成本、高鲁棒性、易集成的灵巧手触觉感知新方案,可为机器人在不确定环境下的灵巧复杂操作提供关键的触觉感知信息。
工程科学学院精密机械与精密仪器系博士生徐迎澳为论文第一作者。工程科学学院、人形机器人研究院王洪波研究员为论文通讯作者。该项研究工作得到了国家自然科学基金项目(52275579)、中国科学院引才计划青年项目、中国科学技术大学高层次人才引进计划和安徽省科技攻坚计划项目重大项目(202423h08050003)以及中央高校基本业务费的支持。
论文链接:https://ieeexplore.ieee.org/document/11399261