近日,中国科学技术大学工程科学学院、人形机器人研究院孙帅帅特任教授课题组联合澳大利亚伍伦贡大学李卫华教授、中科大贠国霖特任教授和张世武教授,成功研发了一种基于磁流变技术的手部外骨骼系统,能够极大增强手部抓握耐力与抓握力,有望服务于地震救援、工业生产等应用场景。相关成果以“Non-motorized Hand Exoskeleton for Rescue and Beyond: Substantially Elevating Grip Endurance and Strength”为题在线发表于机器人领域著名国际期刊《IEEE Transactions on Robotics》。
人手的抓握功能对于人类发展至关重要。然而,受限于人手和手臂肌肉的大小,人手在承受较大重量时很快疲劳,影响地震、火灾救援等工作的开展。可穿戴的手部外骨骼机器人能够利用机械结构及致动器共同作用给予人手助力,从而增强人手功能表现,是当前机器人领域的研究热点之一。然而,现有的外骨骼研究中使用的电机、液压、气动等致动器普遍存在着输出力小、体积大和重量大等问题,难以解决大幅增强手部抓握耐力和抓握力的困境。
研究团队利用磁流变智能材料模量可调的特性,创新地设计了基于磁流变轴承和滚珠丝杆结构的被动致动器,在仅需5瓦功耗下实现了最高1046牛的大输出力,力-功率比相较其他方案提升一个数量级,在同样输出力下节省了97.7%的能量消耗。将其应用到手部外骨骼上时,整手可提供788N的最大助力。同时,磁流变致动器在结合飞轮后,人手穿戴外骨骼可以在无需外部能量输入情况下提升41.8%的瞬时抓握力。
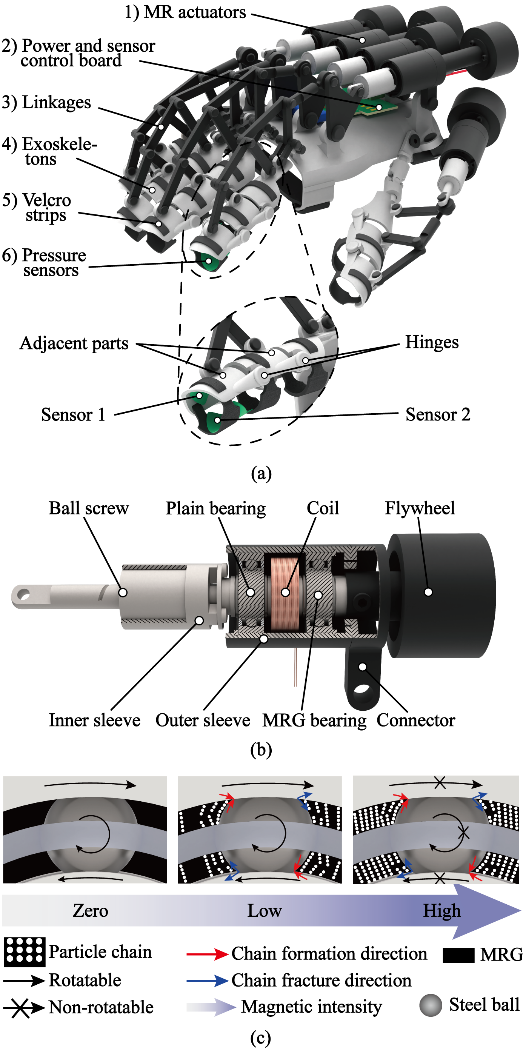
图1 手部外骨骼与磁流变致动器结构,以及磁流变轴承工作原理
研究团队对磁流变手部外骨骼进行了地震救援模拟应用实验。在营救被压人员和运送伤员的任务中,受试者指屈肌的肌电信号幅度均大幅减小,意味着控制手指抓握的肌肉活动度大幅降低。在运送伤员任务中,受试者呼吸率相较无外骨骼情况平均降低了20%,最大运送距离提升了110%。实验表明,团队研发的磁流变手部外骨骼可大幅提升人手抓握耐力、降低重体力劳动中的运动代谢、提高救援工作任务效率,该项工作有望应用于地震、火灾救援与工业生产领域。
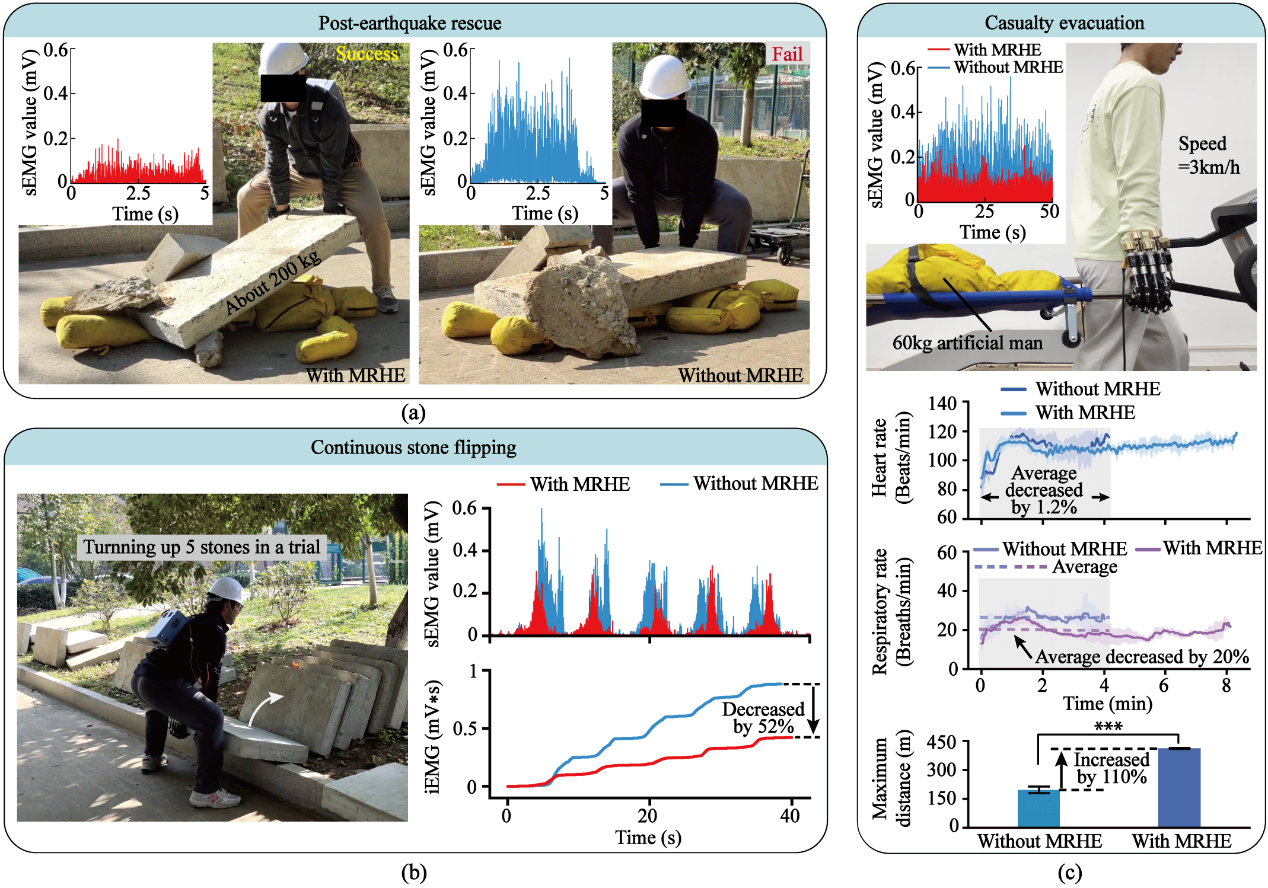
图2 磁流变手部外骨骼在地震救援中的应用实验
工程科学学院精密机械与精密仪器系博士生麦贤龙为第一作者,工程科学学院精密机械与精密仪器系孙帅帅特任教授、澳大利亚伍伦贡大学李卫华教授以及近代力学系贠国霖特任教授为论文共同通讯作者。论文的合作者还包括中国科大工程科学学院张世武教授、龚兴龙教授、西安电子科技大学机电工程学院訾斌教授、安徽大学杨健教授以及中科大在读博士生黎雷等。该项研究工作得到了国家自然科学基金、中国科大科研启动资金、中央高校基本科研业务资金、中国科大雏鹰基金以及英国皇家学会-牛顿国际奖学金的支持。《IEEE Transactions on Robotics》(T-RO)为机器人学领域公认的国际顶级期刊之一,要求论文在理论及工程实践上均能为机器人学发展做出重要贡献,其每年全球发文量约200篇,接收率极低,代表了机器人领域先进的重大进展。
论文连接:https://ieeexplore.ieee.org/document/11080110